基于DSP的异步电机矢量控制系统设计
0 引言
随着现代控制理论、微处理技术和电力电子技术的不断发展,基于矢量控制的高性能交流传动系统得到广泛的应用。异步电机是一个多变量、强耦合、非线性的时变参数系统,若以转子磁通这一旋转的空间矢量为参考坐标,再利用坐标变换,就可以把定子电流中的励磁分量和转矩分量独立开来分别进行控制。这就是矢量控制的出发点。SVPWM调制技术把逆变器和电机看成一个整体来处理,所得模型简单,便于处理器实时控制,并具有转矩脉动小、噪声低、电压利用率高等优点。本文以TI公司的专用电机控制芯片TMS320F2812为核心,给出了整个异步电机矢量控制系统的设计方案,并通过实验验证了其有效性。
1 异步电机矢量控制原理
矢量控制技术自从上世纪60、70年代开始,国内外众多专家学者就已经进行了潜心的研究,因此,矢量控制技术发展至今,内容已经非常丰富。本文只讨论基于转子磁场定向的矢量控制原理。
1.1 异步电机控制的数学模型
鼠笼式异步电机在d,q两相同步旋转坐标系下的数学模型的电压方程为:
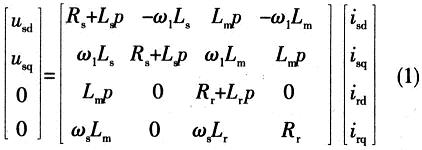
其中:usd和usq分别为d,q旋转坐标系下的定子电压;isd和isq分别为d,q旋转坐标系下的定子电流;ird和irq分别为d,q旋转坐标系下的转子电流;Rs和Ls分别为定子绕组的电阻与自感;Rr和Lr分别为定子绕组的电阻与自感;Lm为定转子互感;P为微分算子;ω1为同步旋转角频率;ωs为转差角频率;
将转子磁链矢量定在d轴方向上,可以推导出转子磁链为:

其中:Tr为转子时间常数。
由式(2)可见,调节定子电流的isd分量可以调节转子磁链ψr,而当保持该定子电流磁通分量不变时,转子磁通保持不变。其转矩方程为:

其中:Te为电磁转矩;np为电机的极对数;由式(3)可见,控制定子电流isq分量可以控制电机的电磁转矩Te,通过该转矩分量可以调节电机的转速。该控制系统采用双闭环结构,图1所示是其控制系统结构原理图。
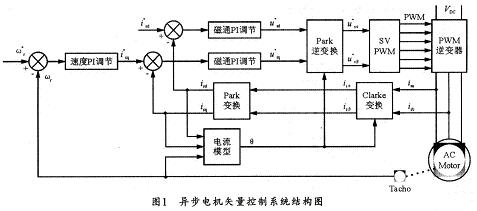
该控制系统所检测的两相定子电流经Clarke与Park变换后可产生转矩电流分量和励磁电流分量,然后结合检测转速并通过电流模型计算坐标变换所需的磁链角。检测转速与给定转速误差经PI调节后将生成转矩给定值。转矩电流分量与励磁电流分量的误差经PI调节可产生u小M。给定值,并在通过旋转坐标变换后输入SVPWM模块以产生6路PWM波,从而控制逆变器。
1.2 SVPWM原理
电压空间矢量PWM技术是SPWM技术与电机磁链圆形轨迹直接结合的一种方法。它从电动机角度出发,直接以电动机磁链圆形轨迹控制为目的,该方法不仅在控制上与SPWM的效果相同,而且更直观,物理意义更明晰,实现起来也很方便。SVPWM调制方法是利用交替使用不同的电压空间矢量(六个基本电压矢量和两个零矢量)合成实现的。参考矢量合成规则是:由当前参考矢量所在扇区的两个电压矢量分别作用一定时间合成所得。为了补偿参考矢量的旋转频率,设计时需要插入零矢量。
2 控制系统硬件组成
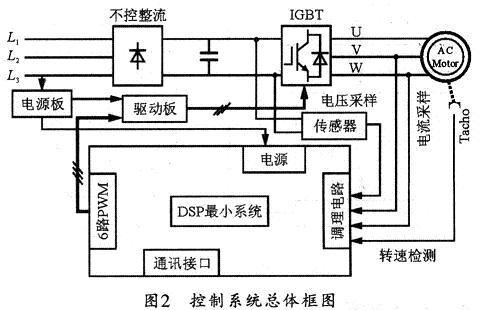
本系统主电路由整流电路、中间直流电容滤波和IGBT模块封装逆变器等组成。控制电路采用TI公司的电机专用控制芯片TMS320F2812为核心,由DSP最小系统板与控制底板构成,用以实现采样调理、矢量控制及SVPWM调制算法等。此外,该控制系统还包括隔离开关电源、PWM驱动电路、转速转矩传感器、以及霍尔电流传感器等辅助电路,其中开关电源为整个控制电路提供多路隔离电源,其控制系统总体框图如图2所示。
2.1 定子电流检测
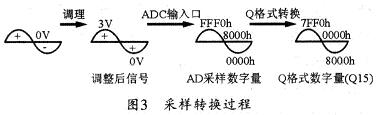
通过霍尔电流传感器可将采样得到的两相定子电流经过调理电路后送入DSP的AD口,以将模拟信号转换为数字信号。其采样转换过程如图3所示。
2.2 转速检测
通过智能数字式转矩转速测量仪可检测转速。当测速码盘连续旋转时,可通过光电开关输出具有一定周期宽度的脉冲信号,这样,根据码盘的齿数和输出信号的频率,即可计算出相应的转速。
3 控制系统软件设计
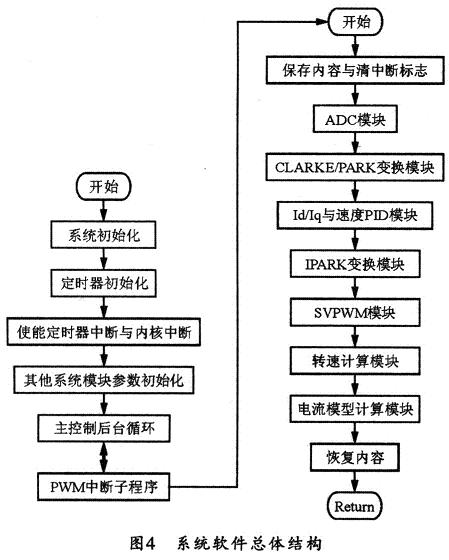
控制系统软件主要分为两部分:一是控制系统主程序,包括系统初始化、定时器初始化、使能定时器下溢中断与CPU中断、其他系统模块参数初始化等;二是中断子程序,包括ADC模块、CLARKE/PARK变换模块、Id/Iq与速度PID模块、PARK逆变换模块、SVPWM模块、速度计算模块、电机电流模型计算模块等。整个系统软件的总体结构如图4所示。
4 实验结果
通过实验可对上述矢量控制算法进行实验验证,实验时,可选功率开关管的开关频率为5kHz,死区为5.2μs。电机为4极三相笼型异步电机,其额定参数为:PN=3 kW,UN=220V,IN=7.5A,fN=50 Hz,nN=1500 r/min。图5所示是实验得出的结果和响应曲线。
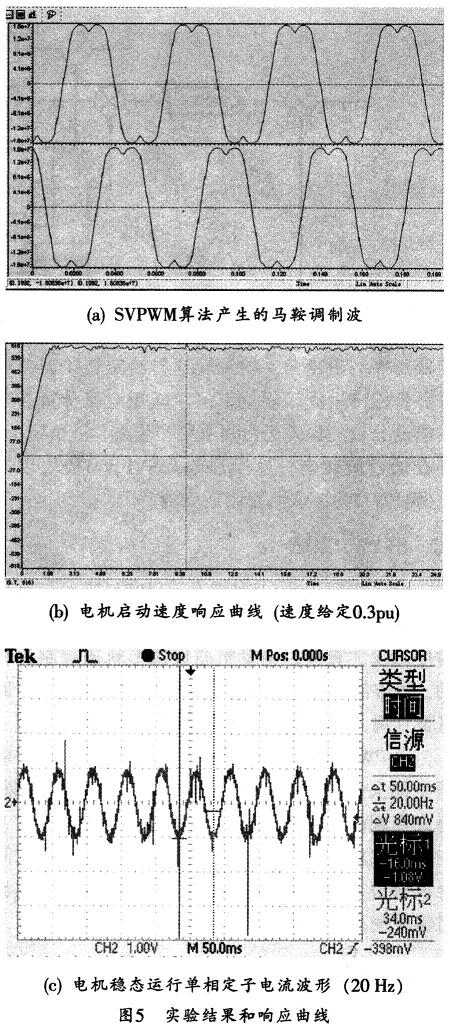
该实验结果显示,该控制系统具有良好的动态和静态特性。
5 结束语
本文以TI公司的电机控制专用DSP芯片TMS320F2812为基础,采用基于转子磁场定向控制和SVPWM调制技术,构建了一种异步电机矢量控制系统,并通过实验验证了该控制算法的正确性和有效性,具有一定的实用价值。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。

